
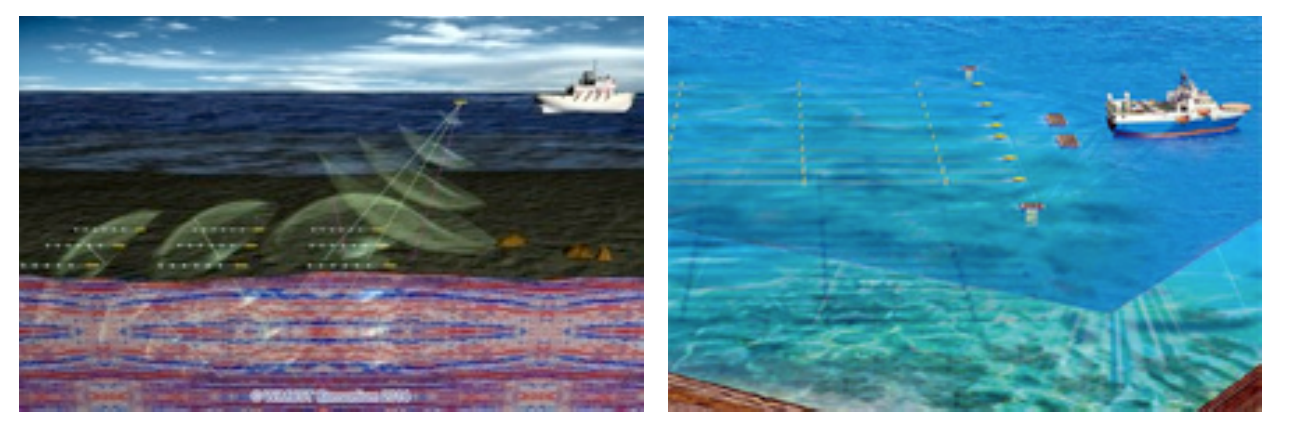
The WiMUST (Widely scalable Mobile Underwater Sonar Technology) project aims at expanding and improving the functionalities of current cooperative marine robotic systems, effectively enabling distributed acoustic array technologies for geophysical surveying with a view to exploration and geotechnical applications. Recent developments have shown that there is vast potential for groups of marine robots acting in cooperation to drastically improve the methods available for ocean exploration and exploitation. Traditionally, seismic reflection surveying is performed by vessel towed streamers of hydrophones acquiring reflected acoustic signals generated by acoustic sources (either towed or onboard a vessel). In this context, geotechnical surveying for civil and commercial applications (e.g., underwater construction, infrastructure monitoring, mapping for natural hazard assessment, environmental mapping, etc.) aims at seafloor and sub-bottom characterization using towed streamers of fixed length that are extremely cumbersome to operate. The vision underlying the WiMUST project is that of developing advanced cooperative and networked control / navigation systems to enable a large number (tens) of marine robots (both on the surface and submerged) to interact by sharing information as a coordinated team (not only in pairs). The WiMUST system may be envisioned as an adaptive variable geometry acoustic array. By allowing the group of surface and submerged vehicles to change their geometrical configuration, an end-user can seamlessly change the geometry of the ”virtual streamer” trailing the emitter, something that has not been achieved in practice and holds potential to drastically improve ocean surveying. The project brings together a group of research institutions, geophysical surveying companies and SMEs with a proven track record in autonomous adaptive and robust systems, communications, networked cooperative control and navigation, and marine robot design and fabrication. The objective of this paper is to give an overview regarding the objectives, methods and approach of the WiMUST project [1]. The WiMUST project aims at conceiving, designing, and engineering an intelligent, manageable, distributed and reconfigurable underwater acoustic array that could drastically improve the efficacy of the methodologies used to perform geophysical and geotechnical acoustic surveys at sea. The employment of WiMUST system will result beneficial in a vast number of applications in the fields of civil engineering and oil & gas industry, where seabed mapping, seafloor characterization, and seismic exploration are fundamental operations.
The novel key feature of the WiMUST system consists in the use of a team of cooperative autonomous marine robots, acting as intelligent sensing and communicating nodes of reconfigurable moving acoustic network. The vehicles are equipped with hydrophone streamers of small aperture, such that the overall system behaves as a large distributed acoustic array capable of acquiring acoustic data obtained by illuminating the seabed and the ocean sub-bottom with strong acoustic waves sent by an acoustic source installed on board a support ship / boat. By actively controlling the geometry of the robot formation,becomes possible changing the shape of the acoustic array, according to the needs of the considered application. The resulting operational flexibility holds tremendous potential advantages, as it allows improving the seabed and sub-bottom resolution and obtaining sidelobe rejection at almost any frequency and for any plane. The availability of the proposed system, other than improving the quality of the acquired data, will also greatly facilitate the operations at sea, thanks to the lack of physical ties between a surface ship and the acquisition equipment.
The project has been favorably evaluated by the European Community within the H2020 framework [2]. It is expected to start at the beginning of February 2015 for a duration of 36 months. The activities will cover the issues of Scenario Analysis, Distributed Sensor Array, Cooperative Control, Mission Planning, Communications and finally Integration and Experimentations. The project consortium is composed of nine partners: 4 academic institutions and 5 industrial companies from Italy, United Kingdom, Portugal, Germany, France and The Netherlands.
REFERENCES
[1] G. Indiveri, J. P. Gomes and the WiMUST consortium, "Geophysical Surveying with Marine Networked Mobile Robotic Systems: The WiMUST Project", Proceeding WUWNET '14, International Conference on Underwater Networks & Systems, Article No. 46, Rome (Italy), November, 2014. ISBN: 978-1-4503-3277-4 - doi:10.1145/2671490.2677084
[2] HORIZON 2020, WORK PROGRAMME 2014 – 2015, 5. Leadership in enabling and industrial technologies, i. Information and Communication Technologies, Call ICT 23 – 2014: Robotics, a. Research & Innovation Actions