|
You are not Logged in! Log in to check your messages. |
|
|
Check todays hot topics |
Web2Project Sign in
Acoustic Rapid Environmental Assessment (AREA):

The background
The disagregation of the Eastern block in 1990 shifted the concept of global war to that of local war. Local war is generically defined as a regional conflict aiming at the invasion of land or strategic infrastructures by non governamentally controlled armed groups. The contention of such conflict often requires the disembark of small number of troops in hostile remote regions or the control of sea accessible areas from enemy troops, ships, submarines or any other platform from where attacks could be made. These operations require the rapid assessment of the environmental conditions in a given region to which there is no direct (man) access. By region we mean beaches for troops landing and corresponding access sea corridors as well as the coastal area in front of it.

The concept
Classical means involved historical information, deploying of air sensors (sonobuoys) and remote sensing. Nowadays the development and readily availability of underwater platforms such as gliders and autonomous underwater vehicles (AUVs) drastically changed the possibilities of assessing remote information without the necessity to deploy man forces. Deployments can be made in two phases: phase one, where traditional means such as remote sensing, archival data and airborne sensors are used to assess the overall environmental picture up to, say, 10 km from shore and the phase two, where ships may approach the area and deploy moving unmanned platforms to cover in detail the coast up to the beach. In both phases the data collected is assimilated into environmental models to be able to predict not only general circulation models tracing the evolution of currents, temperature and surface agitation in the zone but also, beach models of the surf zone. Moving platforms will be used not only to acquire environmental data (water column and bottom) but also to "clean the area" from possible obstacles and mines.

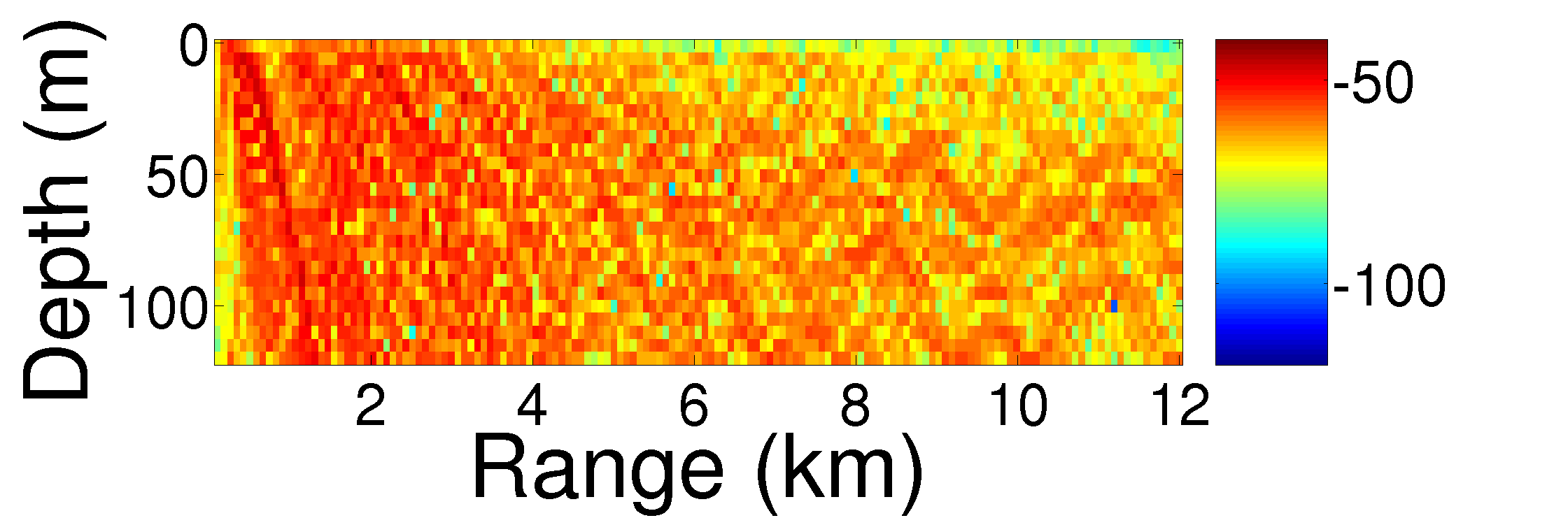
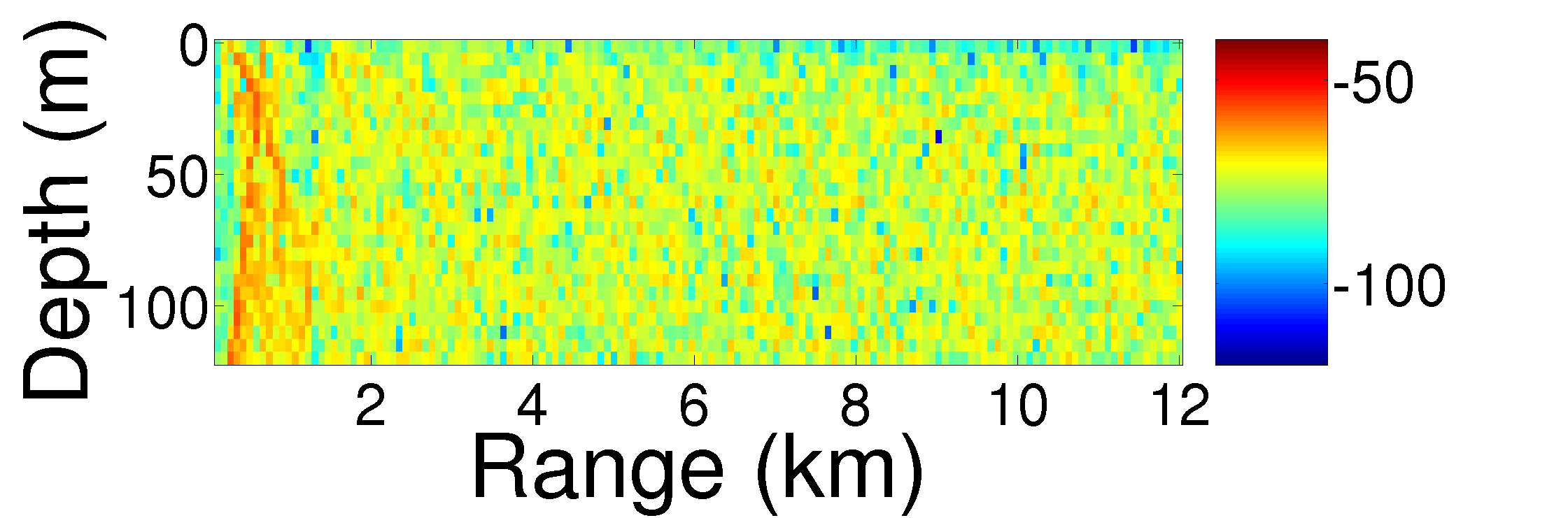
One of the main concerns during phase one is to determine the conditions of acoustic detection
in the objective area so as to
determine the possibilities of being detected or of detecting enemy assets possibly hiden in
the region or close by. This involves the assessment of actual environmental conditions
(nowcast) and predict those to be encountered in the near future (forecast). The classical
approach is to deploy as much sensors as possible to initialize appropriately nested ocean
circulation models so as to be able to predict water column and surface evolution in the next
12, 24 or 48 hours. These environmental conditions are then feed into acoustic numerical
propagation models to determine acoustic transmission loss (TL) and therefore compute actual
performance surfaces for the area at hand. The main drawback of this approach is that the
optimization is done in the oceanographic but not in the acoustic information.

Technological tools
The technological tools being developed at SiPLAB include easy-to-deploy and easy-to-use
Acoustic Oceanographic Buoys (AOB) (figure on the left). AOBs have been successfully tested
in several sea trials since 2003 (version 1) and then after 2005 (actual version 2). See
sea trials for a complete list of experiments where AOBs have
been used. See various publications on the subject such as A. Silva
[abstract, PDF] for
a full description of the AOB2 testing during MakaiEX'2005 in Hawai, and N. Martins
[abstract,
PDF] for an example of the usage of the data provided
by the AOB2 for AREA objectives.
 |
 |
Recent publications:
![]()
Noise Risk Assessment for Deep-Sea Exploration, Springer Nature,
[PDF] May 2026.
 Common dolphin's shipping noise risk assessment on the Portuguese coast,
Mar. Pol. Bull, 211 117415 [PDF]
February. 2025.
Common dolphin's shipping noise risk assessment on the Portuguese coast,
Mar. Pol. Bull, 211 117415 [PDF]
February. 2025.
Featured products:
PAM2py
download zip or github, a Python open source version of the PAMGuide package for Passive Acoustic Monitoring that features the Exchange Data Format (EDF) for facilitated underwater acoustic data sharing and metadata handling. Python allows for a crossplatform licence free processing of raw acoustic data and EDF output. A library of Python routines for EDF data reading and writing are also available. See manual here.
TRACEO
an efficient Gaussian beam 2D ray tracing model for underwater acoustic propagation, handling full bottom and water column range dependency, obstacle scattering and producing particle velocity outputs. See manual here and download a free copy for Fortran. A C version for linux and/or Windows is available here and for GPU here.![]() RSS Feed
| Contact | Accessibility
| Products | Disclaimer
| CSS and
XHTML
RSS Feed
| Contact | Accessibility
| Products | Disclaimer
| CSS and
XHTML
©2009 SiPLAB, Design: OSWD