|
You are not Logged in! Log in to check your messages. |
|
|
Check todays hot topics |
Web2Project Sign in
Project WiMUST
Widely Scalable Mobile Underwater Sonar Tecnology (WiMUST)
WiMUST main objective is to use existing and develop new state of the art underwater robotic technology for efficient geo-physical exploration of surficial sediment properties. This project is funded by the EU under Horizon 2020 program, with 3.9 MEuro under conctract ICT-645141, for 3 years. Starting date: February 1st, 2015. [official WiMUST page]
Abstract:
The WiMUST (Widely scalable Mobile Underwater Sonar Technology) project aims at expanding and improving the functionalities of current cooperative marine robotic systems, effectively enabling distributed acoustic array technologies for geophysical surveying with a view to exploration and geotechnical applications. Recent developments have shown that there is vast potential for groups of marine robots acting in cooperation to drastically improve the methods available for ocean exploration and exploitation. Traditionally, seismic reflection surveying is performed by vessel towed streamers of hydrophones acquiring reflected acoustic signals generated by acoustic sources (either towed or onboard the same vessel). In this context, geotechnical surveying for civil and commercial applications (e.g., underwater construction, infrastructure monitoring, mapping for natural hazard assessment, environmental mapping, etc.) aims at seafloor and subbottom characterization using towed streamers of fixed length that are extremely cumbersome to operate and difficult to steer with accuracy along desired paths. The vision underlying the WiMUST proposal is that of developing advanced cooperative and networked control / navigation systems to enable a large number (tens) of marine robots (both on the surface and submerged) to interact by sharing information as a coordinated team (not only in pairs). Such teams of autonomous robots equipped with acoustic sensors can replace conventional, extremely long streamers, thus physically decoupling the acoustic source from the receivers and affording the latter the capability to follow desired paths accurately, in the presence of external environmental disturbances. This approach has tremendous potential to advance the state of the art technology for seafloor characterization. In this respect, the WiMUST system may be envisioned as an adaptive variable geometry acoustic antenna, thus paving the way for the execution of novel, advanced commercial and scientific missions in a far more cost-effective manner. By allowing the group of surface and submerged vehicles to change their geometrical configuration, an end-user can seamlessly change the geometry of the ”virtual streamer” trailing the emitter, something that has hitherto not been achieved in practice and holds potential to drastically improve the means available for ocean surveying. The project brings to the core of the proposed R&D effort a group of research institutions, geophysical surveying companies and SMEs with a well proven track record in a vast number of areas that include autonomous adaptive and robust systems, communications, networked cooperative control and navigation, and marine robot design and fabrication.
Objectives:
 The main goal of WiMUST is
to conceive, desig, and engineer an intelligent, manageable, distributed and reconfigurable
underwater acoustic array that could drastically improve the efficacy of the methodologies
used to perform geophysical and geotechnical acoustic surveys at sea;
The main goal of WiMUST is
to conceive, desig, and engineer an intelligent, manageable, distributed and reconfigurable
underwater acoustic array that could drastically improve the efficacy of the methodologies
used to perform geophysical and geotechnical acoustic surveys at sea;- the system to be developed under WiMUST
will result beneficial in a vast number of applications in the fields of civil engineering
and oil & gas industry, where seabed mapping, seafloor characterization, and seismic
exploration are fundamental operations;
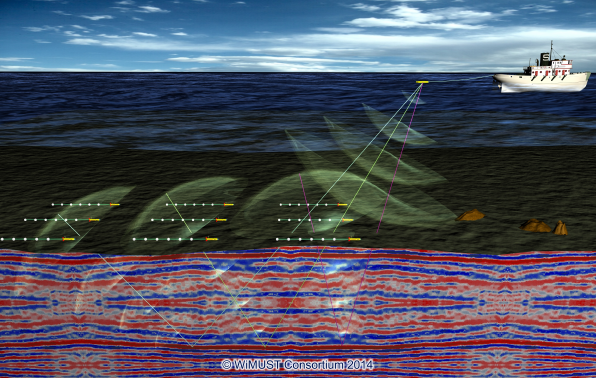
- the novel key feature of the WiMUST
system consists in the use of a team of cooperative autonomous marine robots, acting as
intelligent sensing and communicating nodes of a reconfigurable moving acoustic network.
The vehicles are equipped with hydrophone streamers of small aperture, such that the
overall system behaves as a large distributed acoustic array capable of acquiring acoustic
data obtained by illuminating the seabed and the ocean sub-bottom with strong acoustic
waves sent by an acoustic source installed on-board a support ship / boat. By actively
controlling the geometry of the robot formation, it becomes possible changing the shape
of the acoustic array, according to the needs of the considered application. The resulting
operational flexibility holds tremendous potential advantages, as it allows improving the
seabed and sub-bottom resolution and obtaining sidelobe rejection at almost any frequency
and for any plane. The availability of the proposed system, other than improving the quality
of the acquired data, will also greatly facilitate the operations at sea, thanks to the
lack of physical ties between a surface ship and the acquisition equipment;
- all the mission
phases, from deployment to recovery, will therefore result highly simplified with consequent
sensible savings of mission time and operative costs. Moreover the above capability paves
the way for the design and implementation of different optimal geometric formation control
systems, aimed, for example, at maximising the information content extracted from the
acoustic signals acquired, by selecting the more suitable shape for the scenario at hand.
In order to achieve these challenging objectives, scientific and technological progress
will be needed in the important fields of distributed sensing, cooperative control,
underwater communication and group navigation;
-
The achievement of the project objectives will be measured through experimental activities
driven by the end-user industrial partners and executed with the suite of vehicles already
available in the consortium. Despite the size of the operated team shall be of around ten
vehicles, all the solutions developed during the project will be designed and developed
by taking in mind the mid-long term vision motivating the overall WiMUST research: i.e.
performing underwater missions with large numbers of autonomous cooperating robots.
Indeed the capability of operating big teams represents a fundamental advantage in the
addressed operative domains, as important performances like robustness, time savings,
operational flexibility, and spatial and temporal resolution of acquired data, scale
favourably when increasing the number of robots. A similar consideration holds also
for the experimental environment. While the project achievements shall be tested in
shallow water (as the available vehicles are not rated for higher depths), the project
methodologies are going to be immediately applicable also to deep water scenarios. The
resulting benefits coming from the possibility of deploying a large number of cooperating
AUV, both in shallow and deep water, cannot be overestimated;
- indeed the scientific
developments and the technological innovations of WiMUST project will be exploitable in
additional underwater domains, for enabling the execution of important tasks like those
related with search and rescue operations, environmental monitoring and surveillance
applications, demining, spill detection and plume tracking, underwater archaeology,
and fishery.
Download leaflet.
Download poster.
Partnership

Resources
![]() RSS Feed | Contact |
Accessibility | Products |
Disclaimer |
CSS and
XHTML
RSS Feed | Contact |
Accessibility | Products |
Disclaimer |
CSS and
XHTML
©2017 SiPLAB, Design:
OSWD