|
You are not Logged in! Log in to check your messages. |
|
|
Check todays hot topics |
Web2Project Sign in
Equipment
As an engineering based laboratory, SiPLAB develops unique equipment for underwater acoustic exploration since 2000. Specific pieces of equipment include marine electronics, cables, acoustic and non-acoustic sensors, data acquisition and telemetry. Sea going apparatus require also the management of flotation technology, mechanical robustness, fail proof remote systems and deployment and recover capabilities. Major pieces of equipment are listed below and described in detail in the provided links.
Computer cluster
SiPLAB maintains a computation cluster for onsite and remote usage. This cluster has evolved along time but now features:
- atlas: Dual Intel Xeon(R)@1.9GHz Cores/Threads:12/24 RAM:128GB, HD:8TB
- hydra: i7-3930@3.2GHz, Cores/Threads:6/12 RAM:32GB, HD:128GB SSD
- ryzen32: AMD RyzenThreadripper@4.8GHz Cores/threads:32/64 RAM:128GB/1TB NVMe
- ryzen64: AMD RyzenThreadripper@4.8GHz Cores/threads:64/128 RAM:256GB/1TB NVMe
- ryzen65: AMD RyzenThreadripper@4.8GHz Cores/threads:64/128 RAM:256GB/1TB NVMe
The cluster is remotely accessible through secure connection and supports a set of 10 thinclients in the software room. Additionally SiPLAB has dedicated WiFi, subnet, color and B/W printers, etc.
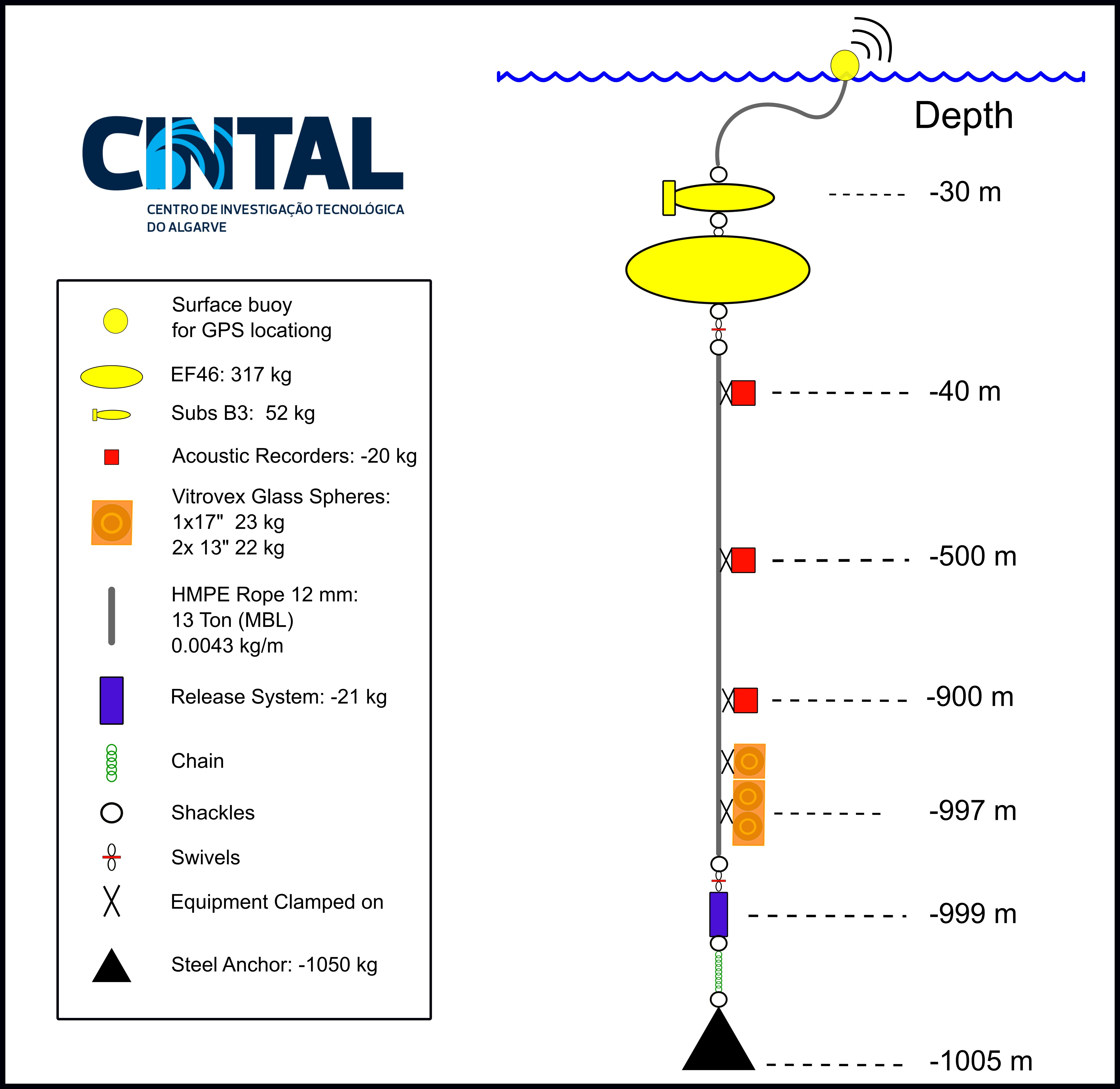
SVA - Sparse Vertical Array for deep water sound recording
The SVA has three autonomous acoustic recorders build by Marsensing for deployments up to 1000 m bottom depth. The SVA was developed by CINTAL under project TRIDENT for measuring ocean sound due to deep sea mining.
Vector sensor towed array
This is a thin line towed array with one acoustic vector sensor and 4 hydrophones at 2 m spacing in the band 10 Hz - 25 kHz with passive stabilizer, realtime tiltmeter and compass.Data is streamed to data logger either on board ship or on AUV. This array was designed and build by Marsesing under project EMSO-PT.
Geo Spectrum vector hydrophones
The set of vector hydrophones was enriched with three units acquired under project EMSO-PT to GEO-SPECTRUM (Canada): one 3D M20 unit and 2 x 2D M35 units, all with 1000m operation depth capacity. Suitable data recorders and mechanical support for standalone or EGIM attached recording is under development.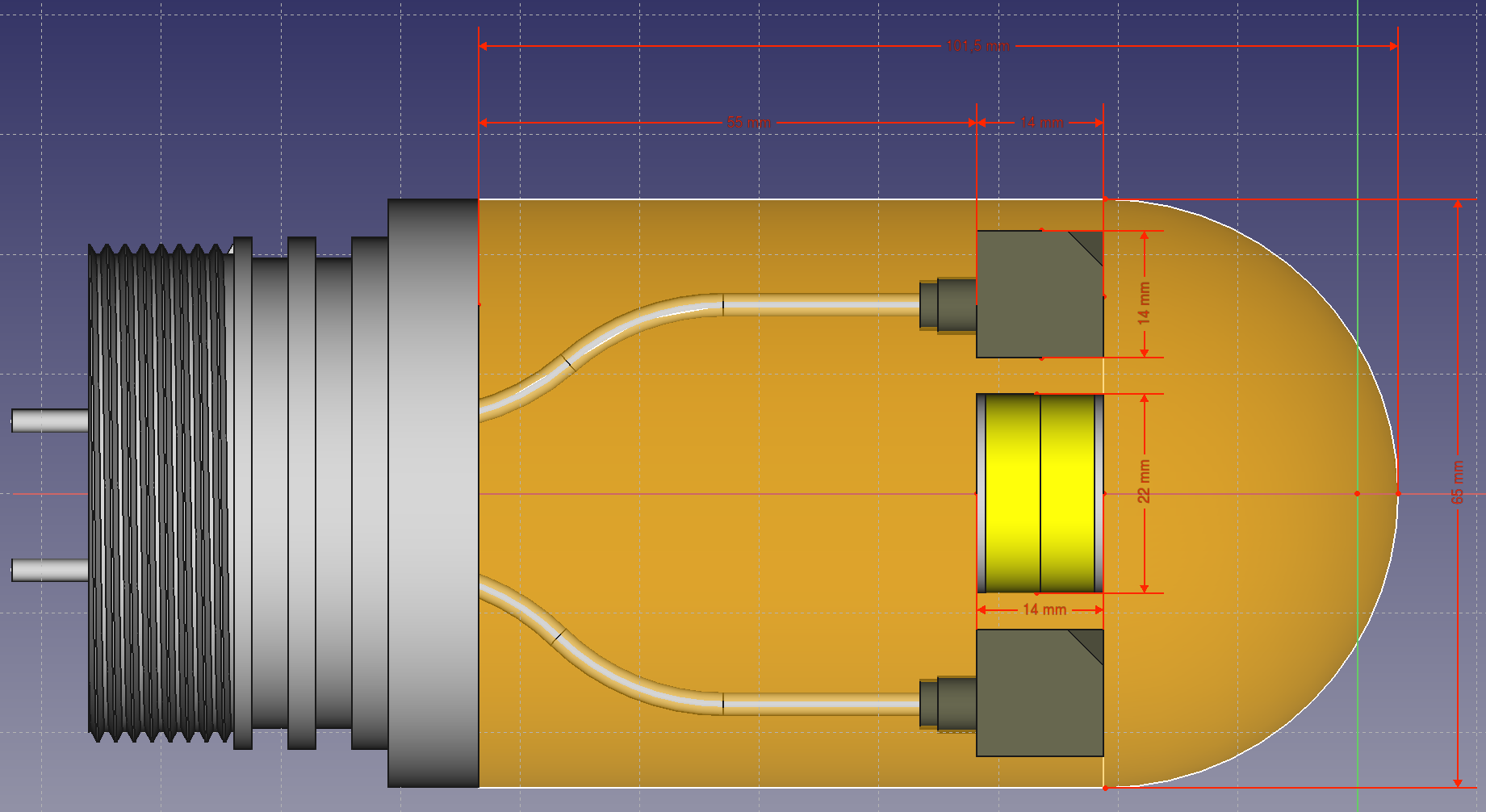
Dual Accelerometer Vector Sensor (DAVS)
The DAVS is first ever SiPLAB's attempt to design and develop an acoustic vector sensor
for underwater applications. This original design was motivated by processing of bottom
reflections for seismic applications under project WiMUST
to be fitted on Autonomous Underwater Vehicles (AUVs) (see pdf
for details).
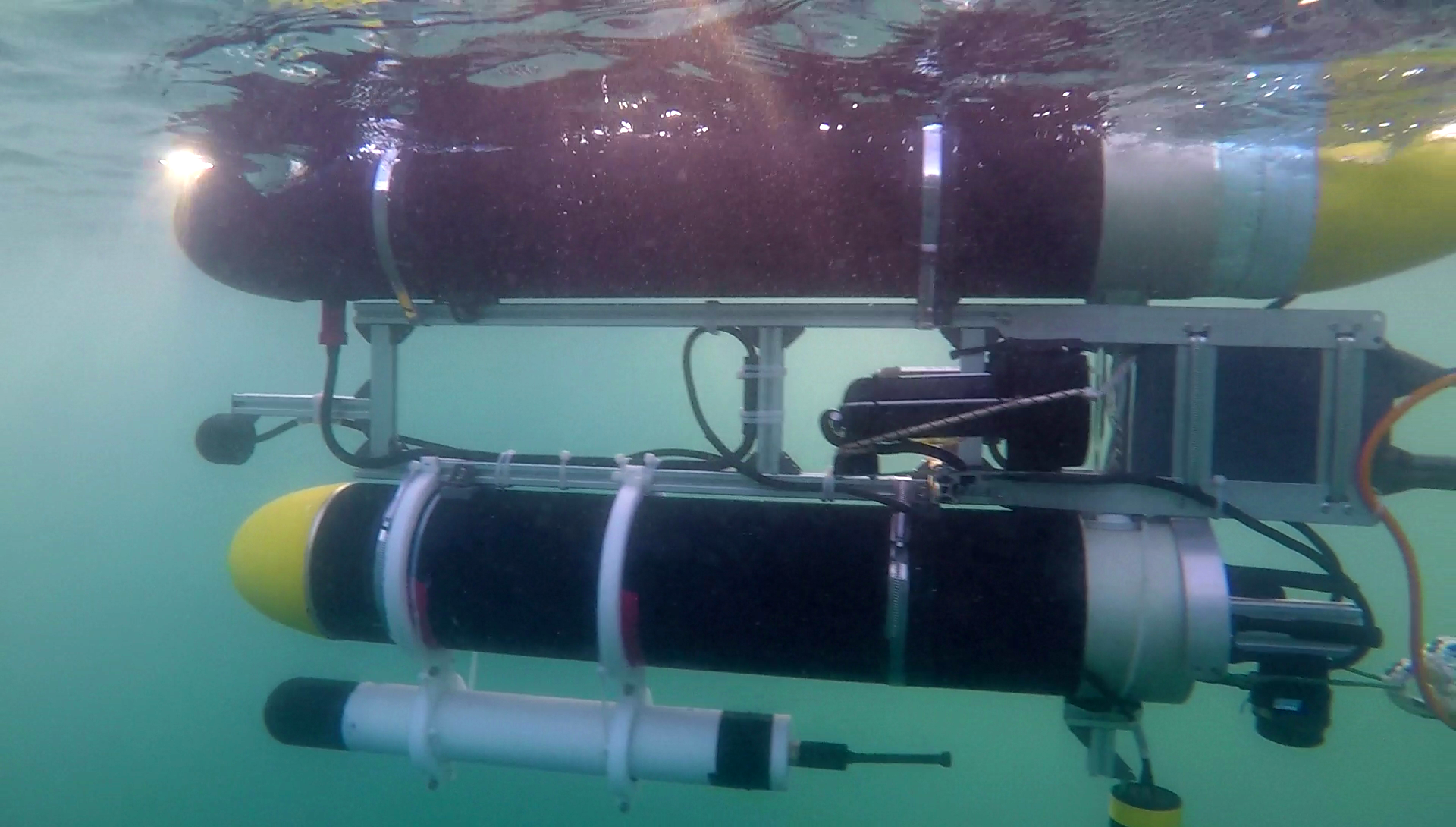 The picture
on the left shows a Medusa class AUV (developed by IST) with the DAVS installed during the
Sines'16 sea trials carried from November 21-25, 2016
at Sines Port. A second, slightly different, version of DAVS (termed as DAVS2) was developed
in 2017 as a potential replacement in case of failure of DAVS or as an alternative to be
mounted on a second vehicle. Developed under project WiMUST.
The picture
on the left shows a Medusa class AUV (developed by IST) with the DAVS installed during the
Sines'16 sea trials carried from November 21-25, 2016
at Sines Port. A second, slightly different, version of DAVS (termed as DAVS2) was developed
in 2017 as a potential replacement in case of failure of DAVS or as an alternative to be
mounted on a second vehicle. Developed under project WiMUST.
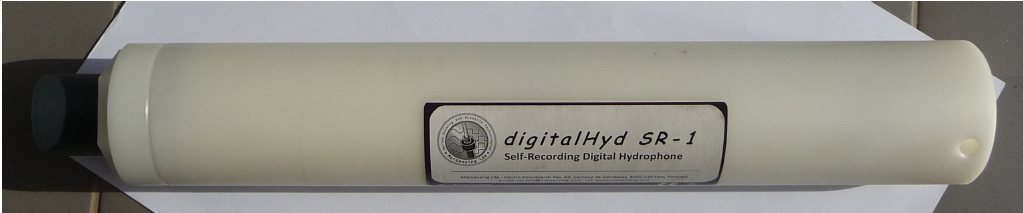
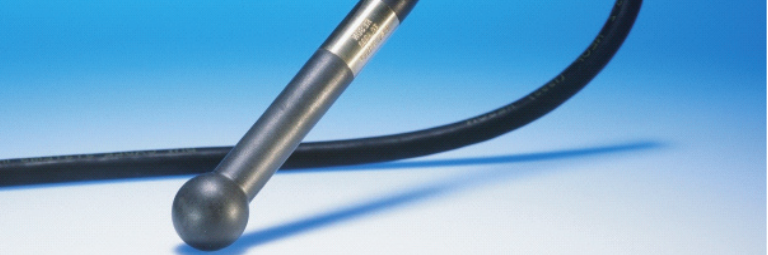
digitalHyd SR1 acoustic recorder
Two units of digital Hyd SR1 which is a single channel underwater acoustic signal
acquisition device. The device is composed of an acquistion unit which includes an
underwater connector for data download and power and an included SQ26 hydrophone
and standalone battery.
Sampling Frequencies: 10, 50 and 100kHz @ 24bits; User settable gain: 0dB up to
36dB in 6dB steps; Container size: 65mm diameter, 500mm length
Purchased under project JONAS.
Reson TC4033
This is a reference hydrophone produced by Reson. It has an excelent sensitivity of -203 dB re 1V/muPa @ 250 Hz and a uniform bandwidth from 1 Hz up to 140 kHz. It may be operated at the end of a long cable without pre-amplifier. Purchased under project SEAOX.

digitalHyd TP-1/4Ch acoustic recorder
The digitalHyd TP-1/4Ch is a 4 channel underwater acoustic signal acquisition device.
The device is composed of an acquistion unit which includes an underwater connector for
telemetry and power and a total of 4 hydrophones with individual cable length of 2m.
The system can be operated in autonomous mode with the integrated battery and storage on
internal SD card or in cabled mode where the data can be streamed in real-time, over ethernet,
to a connected computer.
Sampling Frequencies: 10, 50 and 100kHz @ 24bits
User settable gain: 0dB up to 36dB in 6dB steps.
Cable length: 100 meters
Container size: 65mm diameter, 500mm length
Autonomy with battery: over 20 hours continous, or more with external battery pack.
Purchased with the funds of the Ocean Technology Summer School.

SS21 BATS Sonar System
This broadband Acoustic Transmission System made by SENSORTECH utilizes a broadband flextensional transducer with usable frequency range between 1kHz and 14kHz with a max SPL output 165dB ref 1mPa @ 1m. The system includes a filter at the input of the amplifier that permits limited control over the flatness of the transducer response. The maximum operating depth is 90m. SS21 can be powered by either line voltage (220 VAC) or a 12-volt marine battery. Purchased under project SENSOCEAN.

RBRconcertoCTD fast
The RBRconcertoCTD fast is a multiparameter sonde made by RBR with built-in conductivity, temperature and depth sensors rated to a maximal depth of 200m. This version supports moored and profiling configurations and is expanded with a dissolved oxygen sensor (Rinko Optode). The low power consumption and large data storage facilitate long deployments in stand-alone configurations. The device can be also connected with a cable for real-time parameter. Purchased under project SENSOCEAN.

Short Hydrophone Array (SHA)
A short hydrophone array (SHA) is being developed under project Vector Sensor System for Ocean Exploration (SENSOCEAN). The SHA is composed of 4 pairs of hydrophone elements with a spacing of 10cm between pairs for a total of 32cm array aperture, each individual pair is composed of 2 hydrophones with individual spacing of 2cm. The array was designed for signals in the 5-15 kHz band. The SHA also includes a non-acoustic sensor module which registers array tilt, azimuth, acceleration, temperature and depth. The system includes a dedicated telemetry unit DTU composed of an 8 channel acquisition system with sampling rate of up-to 128kHz per channel. An internal Digital Signal Processor (DSP) acquires data and after processing streams all data in real-time, over ethernet, to a standard portable computer used for remote control and data storage. The system was tested at the tank facilities of Alfeite in collaboration with Arsenal do Alfeite S.A. and CINAV, Portuguese Navy, and at sea in Ria Formosa lagoon and in the Vilamoura area. The SHA will be used at sea during the SENSOCEAN sea trial scheduled for the begin of May 2013 at STARESO Research Station, Calvi, Corsica (France).

Subsurface Telemetry Unit (STU)
The involvement of SiPLAB in project UAN has lead to the development of a bottom mounted receiving array for gateway communication between the underwater network and the WAN. The telemetry unit is part of the base station to which it is connected by a fiber optic power cable. The STU will be tested at sea during the Eng.Test 2010 scheduled for the end of March of 2010 in the vicinity of Vilamoura (Portugal) with the participation of various SiPLAB members and also from other UAN project partners.

Portable Acoustic Source Unit (PASU) and Acoustic Emission and Receive Unit (AERU)
Further equipment requirements in project UAN has lead to the
development of autonomous testing equipment being able to pilot small acoustic sources
and acquire and visualize signals. These are the PASU and AERU systems which typical
usage is depicted in the sketch aside and actual testing took place in the Praia de Faro lagoon
UAN Engineering test in 2009 where further used in several SiPLAB sea trials. PASU and AERU are
portable systems housed in waterproof Peli boxes easily transportable and deployable from small
boats with or without energy supply.
 PASU is able to autonomously pilot Lubell 916C source in a standalone mode due to its internal
battery pack and signal amplifier. It can also playback or generate signals for any other sound
source. The AERU is a PC based unit with an integrated 16-channel data acquisition unit and a
2-channel DAC converter for source piloting (-10/+10 v range). Sampling frequency is up to 250 kHz
per channel for 16 bits resolution.
PASU is able to autonomously pilot Lubell 916C source in a standalone mode due to its internal
battery pack and signal amplifier. It can also playback or generate signals for any other sound
source. The AERU is a PC based unit with an integrated 16-channel data acquisition unit and a
2-channel DAC converter for source piloting (-10/+10 v range). Sampling frequency is up to 250 kHz
per channel for 16 bits resolution.

Acoustic Releasers
CINTAL has acquired three Interocean 111 releasers and a surface operating unit for activating
and ranging. Max operating depth is 300 m and maximum axial load is 100 Kg. Releasers may be operated
as single units or in pairs, offering extra release security. More information may be found in
here.

Acoustic Oceanographic Buoy - version 2 (AOB2)
The involvement of SiPLAB in project RADAR has lead to the development of a second version of the AOB with improved characteristics: compact hardware based on the PC104 standard, data acquisitions upto 32 channels at sampling of 50 kHz/channel, small size and lighter, same autonomy and on board DSP based processing for data reduction, band shift and underwater communications channel equalization. The AOB2 was tested during the MakaiEx sea trial in October 2005 and later on used in the RADAR'06 and BP'07 sea trials.

Acoustic Oceanographic Buoy - version 1 (AOB1)
Under project LOCAPASS SiPLAB has developed a prototype of a light sonobuoy for source localization, acoustic tomography and underwater communications. The AO-Buoy is part of a new concept of network tomography, where a number of free-drifting buoys are simultaneously deployed either from ship or aircraft to collect acoustic and oceanographic data at GPS known locations. The data is transmitted to a base station via a wireless lan network for massive processing and inversion/localization / communications. The AO-Buoy autonomy is set to 10 hours. When they are recovered, data transfer and battery recharge takes a few hours and the AO-Buoy network is ready for redeployment. The AO-Buoy prototype has been fully developed at SiPLAB and tested at sea for shallow water acoustic tomography during the MREA'03 sea trial, from June 18 - 26, 2003 in the area north of Elba Island (Italy) and during the MREA'04 sea trial, from 2 - 10 April, 2004 off the west coast of Portugal.

Broadband Lubell high-frequency acoustic source
This is model 916C sound source made by Lubell. It is a piezoelectric transducer delivering 180 dB/uPA/1 m @ 1000 Hz (20 V rms). Its main advantage is its size and weight for a useful band of 1000 Hz - 20 kHz. Its main disadvantage is the limited depth rating of 12 m without pressure compensation. Purchased under project UAB and used during the several sea trials and acoustic testing experiments.

Broadband Lubell acoustic source
This is model 1424HP sound source made by Lubell. It is a piezoelectric transducer delivering 197 dB/uPA/1 m @ 600 Hz (80 V rms). Its main advantage is its size and weight for a useful band of 400 Hz - 8 kHz. Its main disadvantage is the limited depth rating of 12 m without pressure compensation. Purchased under projects NUACE and UAB.

Low frequency acoustic source
This sound source has been built by Eramer, France, and delivered to CINTAL, for SiPLAB use under project ATOMS. This is a Janus-Helmolthz transducer with a source level of 210 dB and a bandwidth 350-900 Hz mounted on a tow fish. It also features a junction box with a monitor hydrohone and a pressure gauge.

ULVA - Ultra Light Vertical Array
The ULVA system was originaly developed by COLMAR Srl. (Italy) in 1998 for the purpose of project INTIMATE(1998-2001). This system is composed of a surface buoy and two vertical arrays: one low frequency 16 hydrophone-4m spacing array and a high frequency 4 hydrophone array. The LF array has a max bandwidth of 2.2 kHz while the HF array has a bandwidth of 8 kHz centred in 50, 60 or 75 kHz. Each array has a dedicated deep water telemetry unit that can be simultaneously connected to the surface buoy. The surface buoy has got two remote connection fittings: the original system that transmits all data on real time to the remote station via a dedicated 1.2 GHz data link and a SiPLAB developed self registering data with a wireless lan data link for data and buoy status monitoring. This last system was developed under project ATOMS(2000-2004).
Related readings
 DAVS
DAVS
* A. MANTOUKA, P. FELISBERTO, P. SANTOS, F. ZABEL, M. SALEIRO, S.M. JESUS and L. SEBASTIÃO, "Development and testing of a Dual Accelerometer Vector Sensor for AUV acoustic surveys", (abstract), Sensors, vol 17(6), pp.1328 (pdf), June 2017 (doi).
AO-Buoy 2
*A. Silva, F. Zabel and C. Martins, ``Acoustic Oceanographic Buoy: a
telemetry system that meets rapid environmental assessment requirements'', (abstract) Sea Technology, Vol. 47, No.9, pp.15 - 20, (pdf), September 2006.
AO-Buoy 1
*C. Soares, S.M. Jesus, A.J. Silva and E. Coelho, ``Acoustic Oceanographic
Buoy testing during the Maritime Rapid Environmental Assessment 2003 sea trial'',(abstract in Proc. of ECUA'04, Delft, The Netherlands, (pdf), July 2004.
ULVA system*S.M. Jesus, C. Soares, E. Coelho and P. Picco, ``An Experimental Demonstration of Blind Ocean Acoustic Tomography'', (abstract) JASA 119(3), pp. 1420-1431, (pdf), March 2006.
*P. Felisberto, C. Lopes and S.M. Jesus, "An autonomous system for ocean acoustic tomography", (abstract) Sea Technology, Vol. 45, No.4, pp. 17-23, (pdf) April 2004.
![]() RSS Feed
| Contact | Accessibility
| Products | Disclaimer
| CSS and
XHTML
RSS Feed
| Contact | Accessibility
| Products | Disclaimer
| CSS and
XHTML
©2013-2024 SiPLAB, Design: OSWD